
Page 15 - МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
P. 15
13
обчислювати ці значення на всій піраміді зображення. Будуючи піраміду
зображень, використовували процедуру усереднення чотирьох сусідніх пікселів.
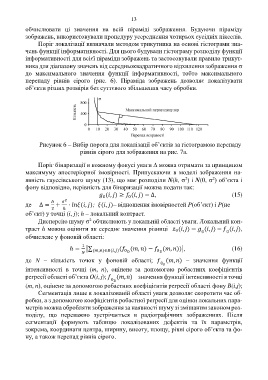
Поріг локалізації визначали методом трикутника на основі гістограми зна-
чень функції інформативності. Для цього будували гістограму розподілу функції
інформативності для всієї піраміди зображень та застосовували правило трикут-
ника для діапазону значень від середньоквадратичного відхилення зображення
до максимального значення функції інформативності, тобто максимального
перепаду рівнів сірого (рис. 6). Піраміда зображень дозволяє локалізувати
об’єкти різних розмірів без суттєвого збільшення часу обробки.
Рисунок 6 ‒ Вибір порога для локалізації об’єктів за гістограмою перепаду
рівнів сірого для зображення на рис. 7а.
Поріг бінаризації в кожному фокусі уваги можна отримати за принципом
максимуму апостеріорної імовірності. Припускаючи в моделі зображення на-
2
2
явність гауссівського шуму (13), що має розподіли N(h, ) і N(0, ) об’єкта і
фону відповідно, нерівність для бінаризації можна подати так:
(, ) ≥ (, ) − Δ, (15)
0
0
ℎ
де Δ = + 2 ⋅ (, ); (, )– відношення імовірностей P(об’єкт) і P(не
2 ℎ
об’єкт) у точці (i, j); h – локальний контраст.
2
Дисперсію шуму обчислюють у локальній області уваги. Локальний кон-
траст h можна оцінити як середнє значення різниці (,) = (,) − (,),
0
0
0
обчислене у фоновій області:
1
ℎ = |∑ (,)∈(,) ( (, ) − (, ))|, (16)
0
0
O B
де N – кількість точок у фоновій області; (,) – значення функції
0
інтенсивності в точці (m, n), оцінене за допомогою робастних коефіцієнтів
регресії області об’єкта O(i, j); (,) – значення функції інтенсивності в точці
0
(m, n), оцінене за допомогою робастних коефіцієнтів регресії області фону B(i,j);
Сегментація лише в локалізованій області уваги дозволяє скоротити час об-
робки, а з допомогою коефіцієнтів робастної регресії для оцінки локальних пара-
метрів можна обробляти зображення за наявності шуму зі змішаним законом роз-
поділу, що переважно зустрічається в радіографічних зображеннях. Після
сегментації формують таблицю локалізованих дефектів та їх параметрів,
зокрема, координати центра, ширину, висоту, площу, рівні сірого об’єкта та фо-
ну, а також перепад рівнів сірого.