
Page 14 - НАЦІОНАЛЬНА АКАДЕМІЯ НАУК УКРАЇНИ
P. 14
12
визначається особливостями конструкції системи стабілізації.
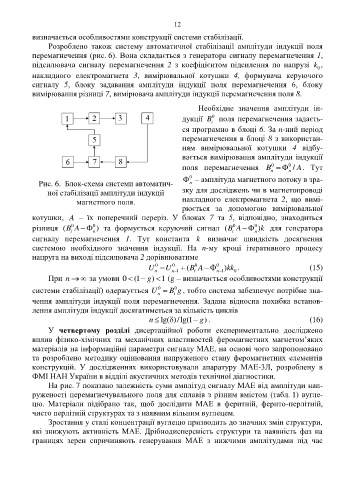
Розроблено також систему автоматичної стабілізації амплітуди індукції поля
перемагнечення (рис. 6). Вона складається з генератора сигналу перемагнечення 1,
підсилювача сигналу перемагнечення 2 з коефіцієнтом підсилення по напрузі k ,
0
накладного електромагнета 3, вимірювальної котушки 4, формувача керуючого
сигналу 5, блоку задавання амплітуди індукції поля перемагнечення 6, блоку
вимірювання різниці 7, вимірювача амплітуди індукції перемагнечення поля 8.
Необхідне значення амплітуди ін-
0
дукції B поля перемагнечення задаєть-
t
ся програмно в блоці 6. За n-ний період
перемагнечення в блоці 8 з використан-
ням вимірювальної котушки 4 відбу-
вається вимірювання амплітуди індукції
0
поля перемагнечення B 0 n / A. Тут
n
0
– амплітуда магнетного потоку в зра-
Рис. 6. Блок-схема системи автоматич- n
ної стабілізації амплітуди індукції зку для досліджень чи в магнетопроводі
магнетного поля. накладного електромагнета 2, що вимі-
рюється за допомогою вимірювальної
котушки, A – їх поперечний переріз. У блоках 7 та 5, відповідно, знаходиться
різниця (B A 0 ) та формується керуючий сигнал (B A 0 )k для генератора
0
0
t n t n
сигналу перемагнечення 1. Тут константа k визначає швидкість досягнення
системою необхідного значення індукції. На n-му кроці ітеративного процесу
напруга на виході підсилювача 2 дорівнюватиме
U U n 0 1 (B A 0 1 )kk . (15)
0
0
n
n
0
t
При n за умови 0 (1 g
) 1 (g – визначається особливостями конструкції
0
системи стабілізації) одержується U B g , тобто система забезпечує потрібне зна-
0
t
n
чення амплітуди індукції поля перемагнечення. Задана відносна похибка встанов-
лення амплітуди індукції досягатиметься за кількість циклів
n lg( )/lg(1 g . (16)
)
У четвертому розділі дисертаційної роботи експериментально досліджено
вплив фізико-хімічних та механічних властивостей феромагнетних магнетом’яких
матеріалів на інформаційні параметри сигналу МАЕ, на основі чого запропоновано
та розроблено методику оцінювання напруженого стану феромагнетних елементів
конструкцій. У дослідженнях використовували апаратуру МАЕ-3Л, розроблену в
ФМІ НАН України в відділі акустичних методів технічної діагностики.
На рис. 7 показано залежність суми амплітуд сигналу МАЕ від амплітуди нап-
руженості перемагнечувального поля для сплавів з різним вмістом (табл. 1) вугле-
цю. Матеріали підібрано так, щоб дослідити МАЕ в феритній, ферито-перлітній,
чисто перлітній структурах та з наявним вільним вуглецем.
Зростання у сталі концентрації вуглецю призводить до значних змін структури,
які знижують активність МАЕ. Дрібнодисперсність структури та наявність фаз на
границях зерен спричиняють генерування МАЕ з нижчими амплітудами під час